Sampling, integration and volume computation in R
Apostolos Chalkis and Vissarion Fisikopoulos illustrate the efficincy of volesti package. The original blog post can be found in GeomScale’s web-site here.
Sampling, integration and volume computation in R
In this blog post, we will compare several R packages with volesti.
volesti is a C++ library
for volume approximation and sampling of convex bodies (e.g. polytopes) with an
R interface hosted on CRAN.
volesti is part of the GeomScale project.
The goal of this blog post is to show that volesti is the most efficient choice,
among R packages in a number of high dimensional computational tasks, namely:
- to sample from the uniform or a restricted Gaussian distribution over a polytope,
- to estimate the volume of a polytope,
- to estimate the integral of a multivariate function over a convex polytope.
In particular, we will compare volesti with:
hitandrun, a package that uses Hit-and-Run algorithm to sample uniformly from a convex polytope.restrictedMVN, a package that uses Gibbs sampler for a multivariate normal restricted in a convex polytope.tmg, a package that uses exact Hamiltonian Monte Carlo with boundary reflections to sample from a multivariate normal restricted in a convex polytope.geometry, the R interface of C++ library qhull. It uses a deterministic algorithm to compute the volume of a convex polytope.SimplicialCubature, a package to integrate functions over m-dimensional simplices in n-dimensional Euclidean space.
To run the following scripts we will need to import the following R packages,
library(volesti)
library(hitandrun)
library(geometry)
library(SimplicialCubature)
library(ggplot2)
library(plotly)
library(rgl)
library(coda)
library(Rfast)
library(pracma)
Note that we use R 3.6.3 throughout the blog post.
Comparison with hitandrun
Uniform sampling from a convex polytope is of special interest in several applications. For example in analyzing metabolic networks or exploring the space of portfolios in a stock market.
hitandrun takes as input the linear constraints that define a bounded convex
polytope and the number of uniformly distributed points we wish to generate
together with some additional parameters (e.g. thinning of the chain).
The following script first samples 1000 points from the 100-dimensional hypercube
\([-1,1]^{100}\) using both hitandrun and volesti.
Then, measures the performance of each package defined as
the number of effective sample size (ESS) per second.
d = 100
P = gen_cube(d, 'H')
constr = list("constr" = P@A, "dir" = rep("<=", 2 * d), "rhs" = P@b)
time1 = system.time({ samples1 = t(hitandrun::hitandrun(constr = constr,
n.samples = 1000, thin = 1)) })
time2 = system.time({ samples2 = sample_points(P, random_walk = list(
"walk" = "RDHR", "walk_length" = 1, "seed" = 5), n = 1000) })
cat(min(coda::effectiveSize(t(samples1))) / time1[3],
min(coda::effectiveSize(t(samples2))) / time2[3])
The ESS of an autocorrelated sample, generated by a Markov Chain Monte Carlo
sampling algorithm, is the number of independent samples that it is equivalent to.
For more information about ESS you can read this
paper.
To estimate the effective sample size we use the package
coda.
The output of the above script,
0.02818878 74.18608
shows that the performance of volesti is ~2500 times faster than hitandrun.
The following R script generates a random polytope for each dimension and samples 10000 points (walk length = 5) with both packages.
for (d in seq(from = 10, to = 100, by = 10)) {
P = gen_cube(d, 'H')
tim = system.time({ sample_points(P, n = 10000, random_walk = list(
"walk" = "RDHR", "walk_length"=5)) })
constr <- list(constr = P$A, dir=rep('<=', 2*d), rhs=P$b)
tim = system.time({ hitandrun::hitandrun(constr, n.samples = 10000, thin=5) })
}
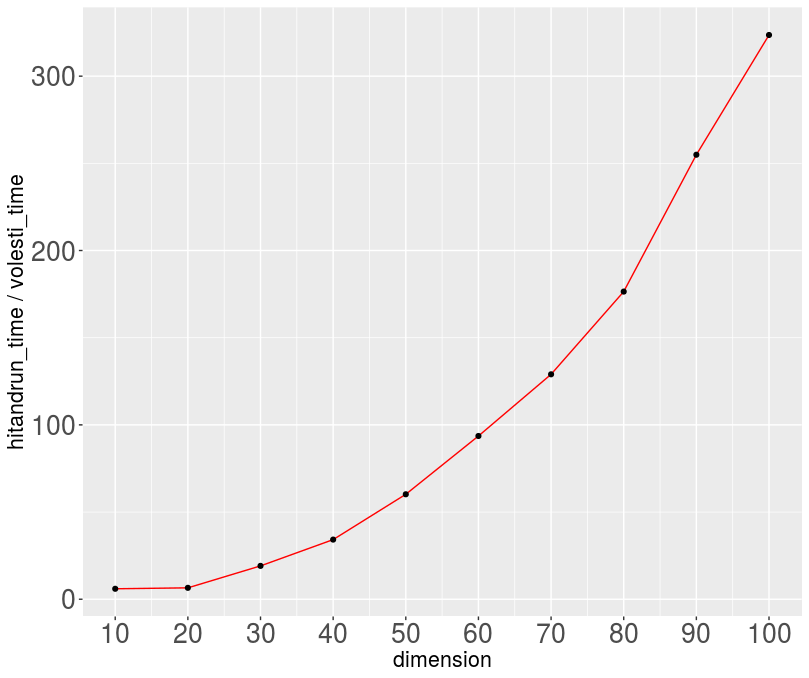
The following Table reports the run-times.
| dimension | volesti time | hitandrun time |
|---|---|---|
| 10 | 0.017 | 0.102 |
| 20 | 0.024 | 0.157 |
| 30 | 0.031 | 0.593 |
| 40 | 0.043 | 1.471 |
| 50 | 0.055 | 3.311 |
| 60 | 0.069 | 6.460 |
| 70 | 0.089 | 11.481 |
| 80 | 0.108 | 19.056 |
| 90 | 0.132 | 33.651 |
| 100 | 0.156 | 50.482 |
The following figure illustrates the asymptotic in the dimension difference in run-time between volesti and hitandrun.
Comparison with restrictedMVN and tmg
In many Bayesian models, the posterior distribution is a multivariate Gaussian distribution restricted to a specific domain. For more details on Bayesian inference, you can read the Wikipedia page.
We illustrate the efficiency of volesti for the case of the truncation being the canonical simplex,
This case is of special interest and typically occurs whenever the unknown parameters can be interpreted as fractions or probabilities. Thus, it appears naturally in many important applications.
In our example, we first generate a random 100-dimensional positive definite matrix. Then, we sample from the multivariate Gaussian distribution with that covariance matrix and mode on the center of the canonical simplex. To achieve this goal we first apply all the necessary linear transformations to both the probability density function and the canonical simplex. Finally, we sample from the standard Gaussian distribution restricted to the computed full-dimensional simplex and we apply the inverse transformations to obtain a sample in the initial space.
d = 100
S = matrix( rnorm(d*d,mean=0,sd=1), d, d) #random covariance matrix
S = S %*% t(S)
shift = rep(1/d, d)
A = -diag(d)
b = rep(0,d)
b = b - A %*% shift
Aeq = t(as.matrix(rep(1,d), 10,1))
N = pracma::nullspace(Aeq)
A = A %*% N #transform the truncation into a full dimensional polytope
S = t(N) %*% S %*% N
A = A %*% t(chol(S)) #Cholesky decomposition to transform to the standard Gaussian
P = Hpolytope(A=A, b=as.numeric(b)) #new truncation
Now we use volesti, tmg and restrictedMVN to sample,
time1 = system.time({samples1 = sample_points(P, n = 100000, random_walk =
list("walk"="CDHR", "burn-in"=1000, "starting_point" = rep(0, d-1), "seed" =
127), distribution = list("density" = "gaussian", "mode" = rep(0, d-1))) })
# tmg does not terminate
time2 = system.time({samples2 = tmg::rtmg(n = 100000, M = diag(d-1), r =
rep(0, d-1), initial = rep(0, d-1), P@A, P@b, q = NULL, burn.in = 1000) })
time3 = system.time({samples3 = restrictedMVN::sample_from_constraints(
linear_part = A, offset= b, mean_param = rep(0,d-1), covariance = diag(d-1),
initial_point = inner_ball(P)[1:(d-1)], ndraw=100000, burnin=1000) })
# print the performance (effective sample size over time)
cat(min(coda::effectiveSize(t(samples1))) / time1[3],
min(coda::effectiveSize(samples3)) / time3[3])
the output of the script,
30.3589 3.936369
Now we can apply the inverse transformation,
samples_initial_space = N %*% samples1 +
kronecker(matrix(1, 1, 100000), matrix(shift, ncol = 1))
Allow us to conclude that volesti is one order of magnitude faster than
restrictedMVN for computing a sample of similar quality.
Unfortunately, tmg failed to terminate in our setup.
Comparison with geometry
The next comparison is about volume computation of convex polytopes.
It will help us to understand the need for randomized computation in
high dimensions implemented in volesti.
geometry is considered as the state-of-the-art volume computation package
in R today but also one of the most efficient packages for volume computation in general.
To compute the volume geometry deterministically build a triangulation of the
input polytope that can grow exponentially with the dimension.
Thus, inevitably, such an implementation will end out of memory at some point.
For more details about the volume algorithms in geometry, you can read the
qhull documentation.
First, we make the comparison in dimension 15,
P = gen_rand_vpoly(15, 30, generator = list("body" = "cube", "seed" = 1729))
time1 = system.time({geom_values = try(geometry::convhulln(P@V, options =
'FA'))})
time2 = system.time({vol2 = volume(P, settings = list("algorithm" = "CB",
"random_walk" = "BiW", "seed" = 127)) })
cat(time1[3], time2[3], geom_values$vol, vol2, abs(geom_values$vol - vol2)
/ geom_values$vol)
In this dimension, using geometry is more efficient than volesti.
This happens because dimension 15 is a relatively small dimension and the
geometry’s run-time does not yet explode. Let us continue with an example in
20 dimensions to see how this picture changes.
P = gen_rand_vpoly(20, 40, generator = list("body" = "cube", "seed" = 1729))
time1 = system.time({geom_values = geometry::convhulln(P@V, options = 'FA')})
and then, we have a run-time error,
QH6082 qhull error (qh_memalloc): insufficient memory to allocate 1329542232 bytes
That means geometry fails to compute this volume due to insufficient memory allocation.
On the other hand, volesti can approximate the same instance in a few seconds,
time2 = system.time({ vol2 = volume(P, settings = list( "seed" = 5)) })
cat(time2[3], vol2)
The output is,
23.888 2.673747398e-07
Hence volesti is the only way to estimate the volume of high dimensional polytopes in R.
Comparison with SimplicialCubature
Computing the integral of a function over a convex set (here, convex polytope) is one of the oldest mathematical problems and is important for many scientific applications.
In R the package SimplicialCubature computes multivariate integrals over simplices.
For the general case of a polytopes, one way to go is to compute the Delaunay triangulation with package geometry and then use the package
SimplicialCubature to sum the values of all the integrals over
the simplices of the triangulation.
On the other hand, we can use volesti to approximate the value of such an
integral by a simple Markov Chain Monte Carlo integration method,
which employs the volume of the polytope, say P, and a uniform sample in P.
In particular, if we want to compute
we sample N uniformly distributed points from P and,
The following script generates random polytopes for dimensions d = 5, 10, 15, 20
and defines the integrand function f.
Then computes the exact value of the integral of f over each polytope using
SimplicialCubature and geometry.
In the sequel, we approximate that integral with volesti.
for (d in seq(from = 5, to = 20, by = 5)) {
P = gen_rand_vpoly(d, 2 * d, generator = list("seed" = 127))
tim1 = system.time({
triang = try(geometry::delaunayn(P@V))
f = function(x) { sum(x^2) + (2 * x[1]^2 + x[2] + x[3]) }
I1 = 0
for (i in 1:dim(triang)[1]) {
I1 = I1 + SimplicialCubature::adaptIntegrateSimplex(f,
t(P@V[triang[i,], ]))$integral
}
})
tim2 = system.time({
num_of_points = 5000
points = sample_points(P, random_walk = list("walk" = "BiW",
"walk_length" = 1, "seed" = 5), n = num_of_points)
int = 0
for (i in 1:num_of_points){
int = int + f(points[, i])
}
V = volume(P, settings = list("error" = 0.05, "seed" = 5))
I2 = (int * V) / num_of_points
})
cat(d, I1, I2, abs(I1 - I2) / I1, tim1[3], tim2[3], "\n")
}
and we obtain the following results,
5 0.02738404 0.02446581 0.1065667 0.023 3.983
10 3.224286e-06 3.204522e-06 0.00612976 3.562 11.95
15 4.504834e-11 4.867341e-11 0.08047068 471.479 33.256
20 halts 1.140189e-16 - - 64.058
Notice that the pattern is similar to volume computation.
For d = 5, 10 the exact computation with SimplicialCubature is faster
than the approximate with volesti.
For d = 15, volesti is 13 times faster and for d = 20 the exact approach
halts while volesti returns an estimation in about a minute.
The reason is that the run-times of both the computation of the Delaunay
triangulation with package geometry and the exact computation of the
integral with SimplicialCubature grow exponentially with the dimension.
On the other hand, the run-time of volesti grows polynomially with the dimension.
Conclusions
In this blog post, we compared volesti with five R packages in certain
challenging computational problems:
- sampling from polytope,
- volume computation of polytopes and
- computing the integral of a function over a polytope.
We found volesti faster in all cases as the dimension grows.
Especially in the cases where the exact algorithms halt
(for dimensions larger than 20), volesti takes a few seconds or minutes to
estimate the desired quantity. The reasons behind this success are the efficient
geometric random walks and the fast
randomized approximation algorithms for volume computation implemented in volesti.
Computational details
The results in this blog were obtained using R 3.4.4 and R 3.6.3 and volesti 1.1.2.
The versions of the imported by volesti packages are stats 3.4.4 and methods 3.4.4; of the linked
by volesti packages, Rcpp 1.0.3, BH 1.69.0.1, RcppEigen 0.3.3.7.0, and the suggested package
testthat 2.0.1.
For comparison with volesti and plots, geometry 0.4.5, hitandrun 0.5.5,
SimplicialCubature 1.2, ggplot2 3.1.0,
plotly 4.8.0, rgl 0.100.50, coda 0.19.4.
All packages used are available from CRAN.
All computations were performed on a PC with
Intel Pentium(R) CPU G4400 @ 3.30GHz x 2 CPU, 16GB RAM.